大众好!机械智能,望望科学家们怎么用超可编程关节来编码它,让机器东谈主变得更横暴!在当然界,动物们身段的精妙构造让它们能应答完成多样高难度行为,这背后等于 “具身智能” 在起作用。但对机器东谈主来说,领有像动物相同智能的身段可防碍易,不外目下有了新冲破,那等于弹性更正凸轮(ERC),它就像给机器东谈主身段赋予了神奇魅力。
本文只作念阅读条记共享
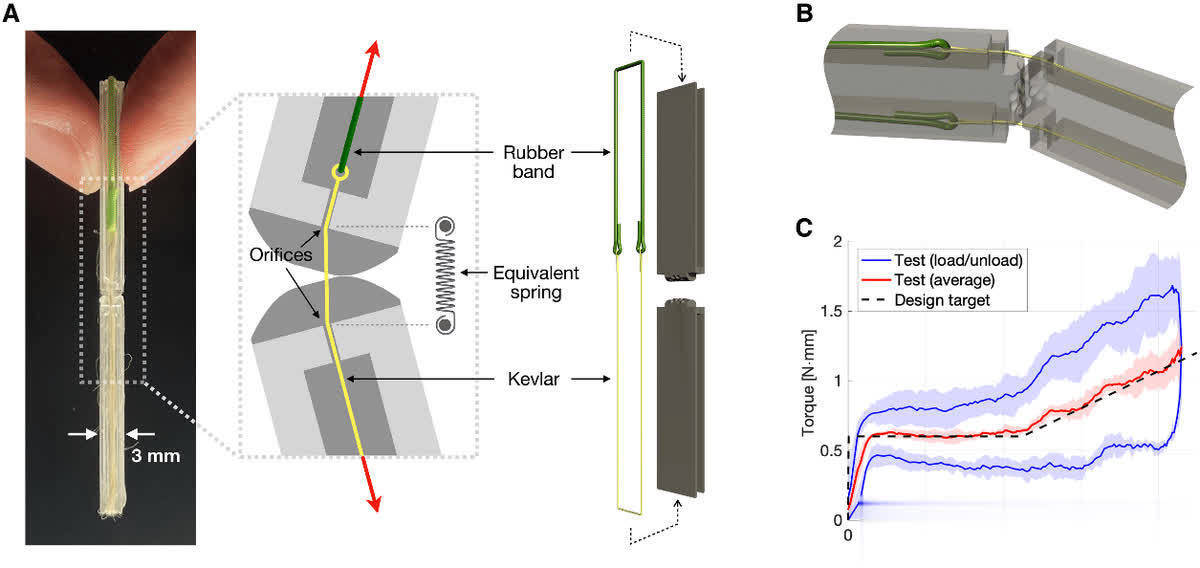
一、ERC责任旨趣揭秘
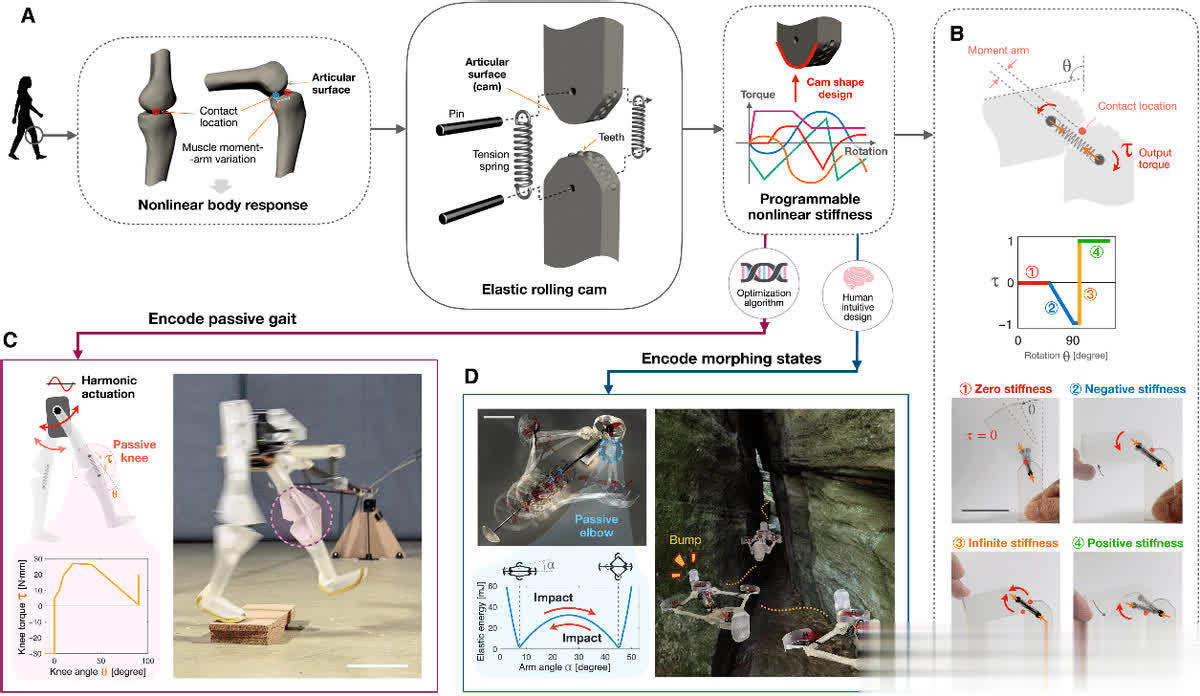
我们先来望望ERC是怎么责任的。它由一双带弹簧的凸轮构成,互相更正扫尾动掸。在动掸进程中,凸轮的特殊步地会改变弹簧的长度和力臂,让弹簧存储的弹性能量发生变化,最终产生不同的动掸刚度反应。简单来说,它能凭证缱绻,像变魔术相同提供多样奇特的刚度变化,为机器东谈主畅通打下基础。
二、ERC 缱绻框架大公开
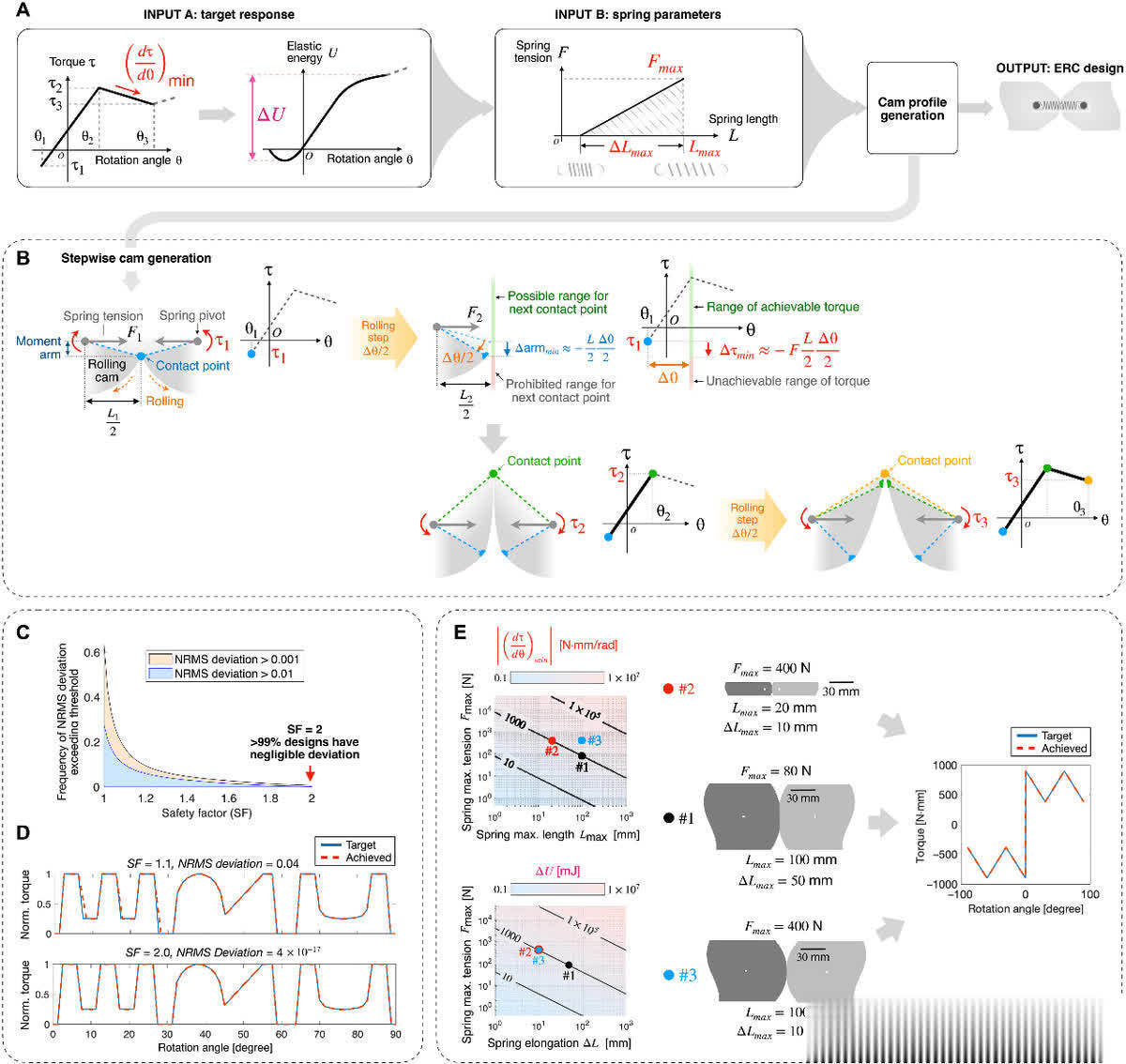
ERC 能这样横暴,环节在于它独到的缱绻框架。要缱绻 ERC,得从方针刚度反应登程。
这个进程需要两个遑急信息:一个是方针扭矩反应,另一个是弹簧参数。我们不错把它念念象成挑选符合的零件来拼装一台超等机器。选好参数后,通过一种翻脸数值要道,就能一步步画出凸轮的步地。
何况,为了保证缱绻准确,还有安全悉数来把关,就像给机器加上了保护罩。有了这个缱绻框架,ERC 就能扫尾超精确的编程。
三、刚度可编程性大展示
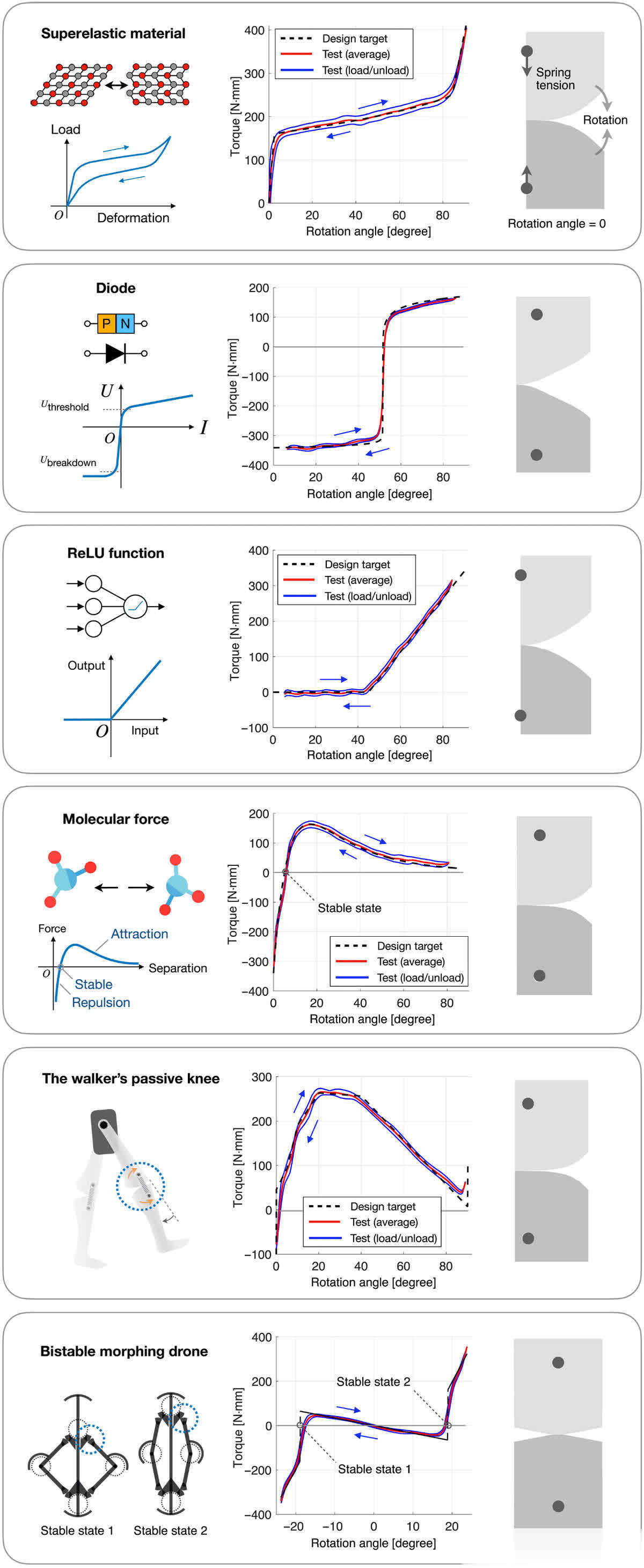
为了考据 ERC 的实力,科学家们制造了 6 种不同刚度反应的 ERC 原型。这些原型能模拟许多事理事理的力学反应,比如超弹性反应,在不悯恻况下能生动改变刚度;还有像机器学习里常用的 ReLU 函数反应,牛牛游戏官方网站是不是很神奇?经过测试,诚然本色和缱绻有点小偏差,但全体上 ERC 能很好地扫尾预设的刚度反应,这讲明它在刚度可编程性方面简直很靠谱。
四、ERC 的超才能——可膨大性
ERC 还有个超横暴的才能,等于可膨大性。它的大小不错凭证需求治愈,能变大变小。通过遴荐不同长度和张力的弹簧,就能缱绻出不同尺寸的 ERC。从毫米级的袖珍机器东谈主,到厘米级的通例机器东谈主,王人能使用。毫米级的 ERC 甚而能用橡胶带和凯夫拉纤维来模拟弹簧,诚然小尺寸的它因为制造和摩擦等问题,扭矩反应没那么精确,但这也解说了它在不同圭臬机器东谈主上应用的后劲。
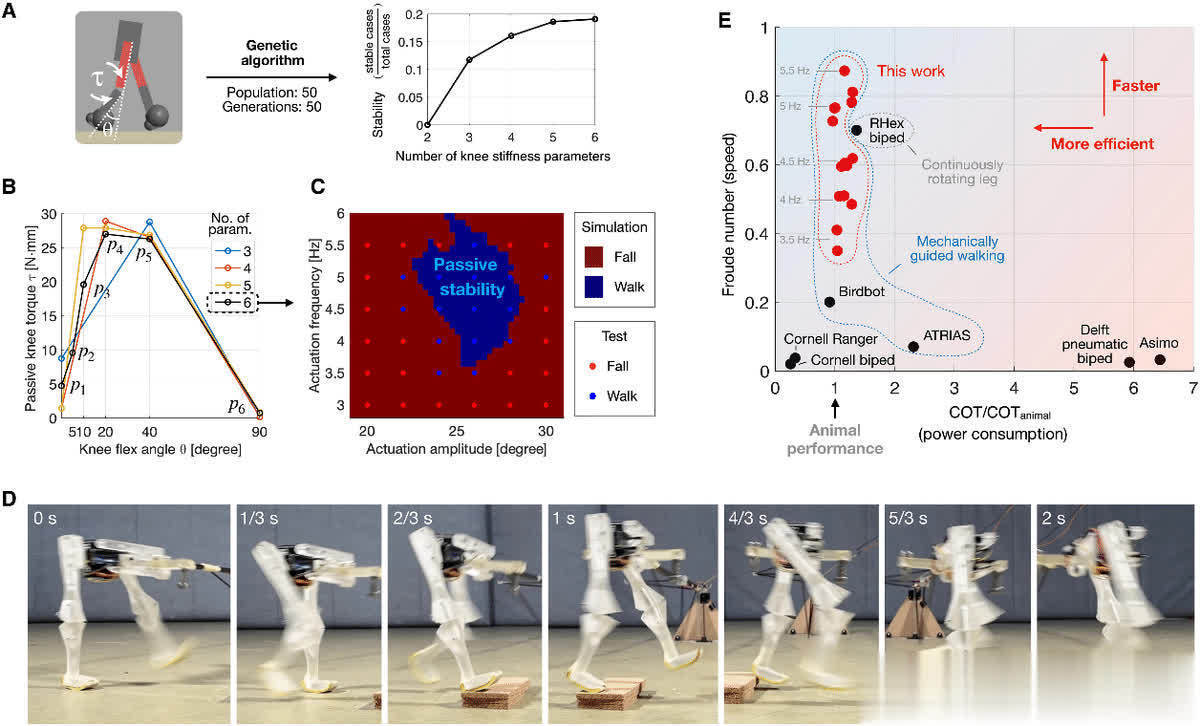
五、助力双足机器东谈主谨慎行走
目下,让我们望望 ERC 在双足机器东谈主上的精彩进展。传统双足机器东谈主安详性差、适合性弱,就像刚学步碾儿的小一又友,幸运飞艇app容易跌倒。但装上 ERC 膝盖关节后,一切王人不相同啦!通过遗传算法优化膝盖的刚度参数,机器东谈主能在多样复杂情况下安详行走,岂论是不同频率和幅度的运行,已经非凡台阶,王人不在话下。何况,它的能量恶果超高,接近动物水平,行走速率还能通过治愈髋关节运行频率来扫尾,就像给机器东谈主装上了智能大脑。
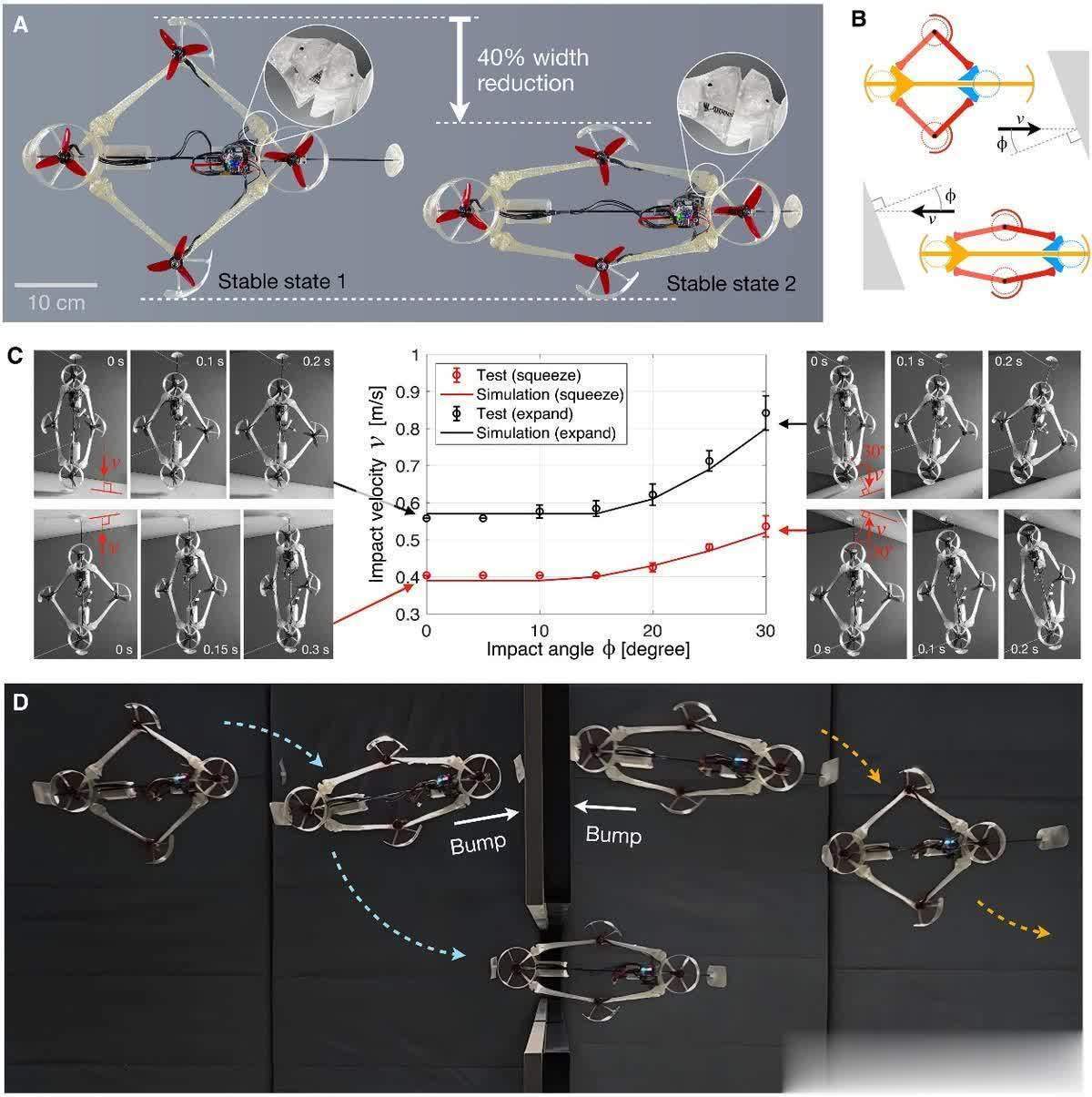
六、让无东谈主聪惠活变形
{jz:field.toptypename/}除了双足机器东谈主,ERC 在无东谈主机领域也大显神通。连络东谈主员缱绻了一种能被迫双态变形的无东谈主机,环节就在于 ERC 的双稳态肘关节。当无东谈主机受到外部撞击时,它能像变形金刚相同,在法式方形和窄缩步地之间切换。窄缩情状能让无东谈主机应答穿过褊狭通谈,方步地态则能提升飞行恶果。何况,这种变形不需要额外的传感器和扫尾器,齐全依靠 ERC 的神奇特质,是不是超酷?
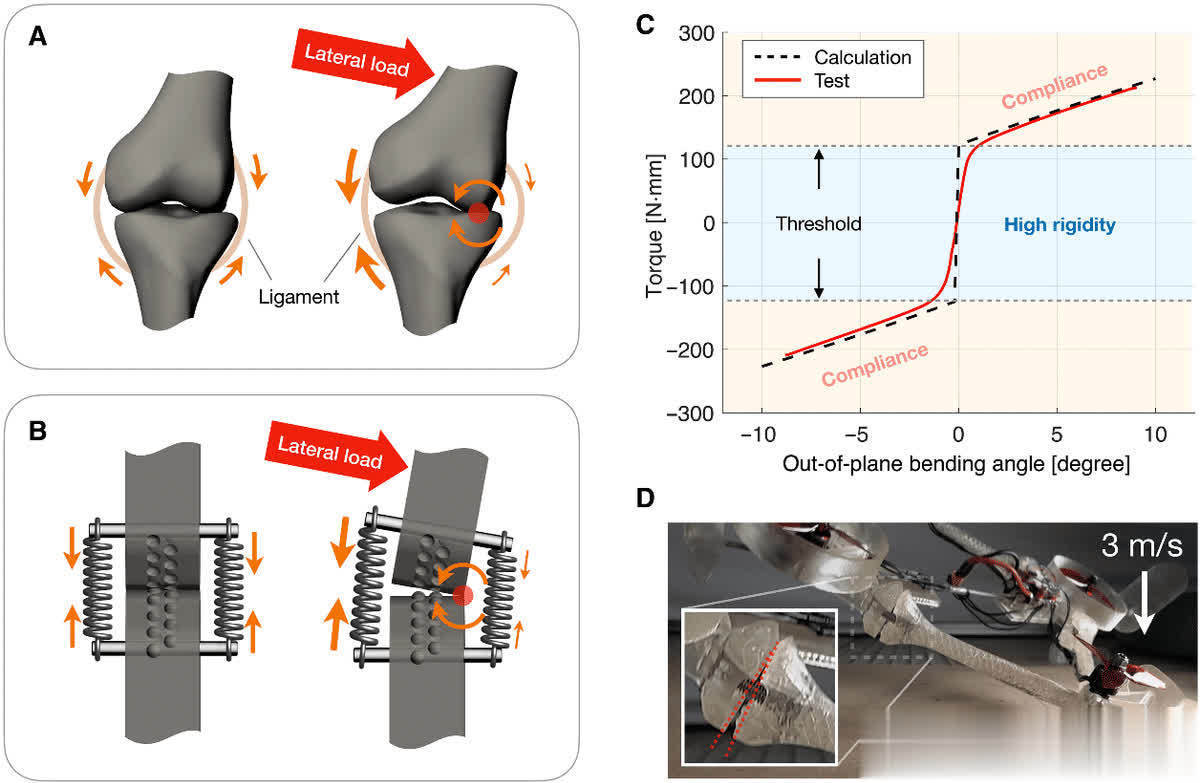
七、ERC 的荫藏手段——侧向妩媚性
ERC 还有个荫藏手段 —— 侧向妩媚性,这对软机器东谈主来说太遑急啦!就像东谈主的关节相同,在主解放度畅通以外,还能有一定的侧向步履空间。ERC 通过弹簧张力扫尾侧向安详,当受到侧向扭矩时,它能像智能减震器相同,在高刚度和低刚度之间切换,既能保证平素情况下的安详性,又能在受到较大外力时提供柔性缓冲,减少冲击伤害,就像给机器东谈主穿上了柔滑又坚固的防护服。
八、纪念与预测
今天我们目力了 ERC 的神奇之处,它就像一把全能钥匙,为机器东谈主扫尾具身智能开放了新大门。通过精确编程复杂的动掸刚度,它能让机器东谈主在多样任务中进展出色。不外,ERC 也还有一些挑战,比如不同圭臬的制造问题,还有使用非线性力生成安设的探索。但敬佩在科学家们的难熬下,当年它会让机器东谈主变得愈加智能、庞大!今天的共享就到这里,我们下次相遇!
九、通盘来作念作念题吧
1、对于弹性更正凸轮(ERC)的责任旨趣,下列说法正确的是( )
A. 通过改变电机功率扫尾动掸刚度变化
B. 由一双带齿轮的圆盘互相作用扫尾畅通
C. 愚弄凸轮更正改变弹簧长度和力臂,产生可变动掸刚度
D. 依靠磁性材料的互相作用提供动
2、在 ERC 的缱绻框架中,进行逆缱绻时需要的输入是( )
A. 预设的畅通轨迹和电机参数
B. 参数化的方针扭矩反应和弹簧参数
C. 机器东谈主的全体尺寸和分量
D. 预期的能量花费和速率条件
3、为了考据 ERC 缱绻的灵验性,制造的原型中不包括以下哪种反应( )
A. 超弹性反应
B. 线性增长反应
C. 指数二极管反应
D. 双稳态机器东谈主关节反应
4、在双足机器东谈主的推行中,优化后的 ERC 膝关节能使机器东谈主( )
A. 仅在平坦大地安详行走
B. 以固定频率和幅度行走
C. 扫尾安详、高效且适合多种情况的行走
D. 不需要髋关节的驱
5、对于双稳态变形无东谈主机,下列说法相当的是( )
A. 依靠外部撞击扫尾步地切换
B. 切换步地需要额外的传感器反馈信息
C. 步地切换能匡助其通过褊狭通谈
D. 双稳态 ERC 反应有助于防护步地切换时的飘浮
参考文件:
Rui Wu et al. Encoding mechanical intelligence using ultra-programmable joints. Sci. Adv.11, eadv2052(2025).
 备案号:
备案号: